
Key takeaways
Bottle lines are among the most demanding secondary packaging environments. High throughput, mixed SKU portfolios, frequent format changeovers between bottle sizes, and the quality control requirements of food, beverage, and pharmaceutical retail supply chains all converge at the case packer stage. Choosing the wrong case packer for a bottle line , one that cannot match the primary line’s peak speed, cannot switch between bottle variants without mechanical retooling, or lacks vision-based defect rejection , creates a secondary packaging constraint that limits the whole operation.
This guide walks through the five decisions that define the right case packer for bottle packaging: robot type and payload, automatic tool changer configuration, vision quality control integration, format flexibility for mixed bottle and shrink pack lines, and how to build a complete case packaging system that connects the case packer to the downstream palletizer under one control architecture. Cybernetik’s Case Packer for Bottles and its related configurations are used throughout as the technical reference, with all specifications sourced from packaging.cybernetik.com.
Whether you are a beverage manufacturer, a juice producer, a sauce and condiment brand, or a pharmaceutical liquid packer, the right case packer for bottle packaging is the system that runs at your filling line’s peak throughput , and still handles the next bottle SKU you add without a capital purchase.
Decision 1: Robot Type and Payload for Your Bottle Throughput
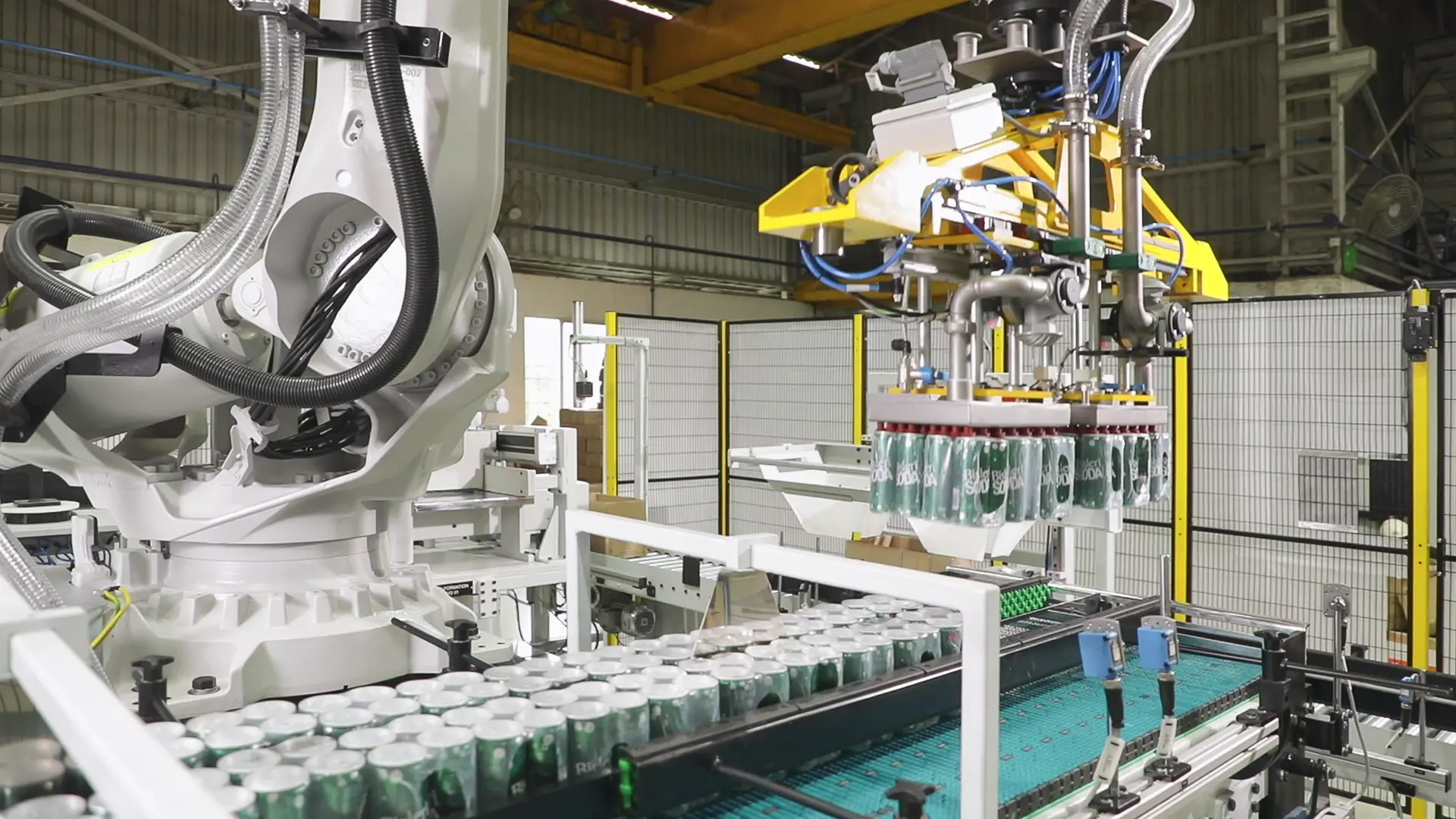
The first and most consequential decision in choosing a case packer for bottle packaging is the robot configuration. Cybernetik builds its bottle case packer on a Six-Axis robot platform with servo and pneumatic end-of-arm customized grippers , reaching speeds of up to 120 bottles per minute with a 200 kg payload.
The Six-Axis configuration is the right robot for bottle case packing because bottles require a wider range of motion than pouches , the robot needs to pick from the matrix station, rotate the grip to match the case orientation, lower into the case without collision, and retract cleanly at speed. SCARA robots, which are excellent for horizontal pouch case packing, lack the rotational freedom for the bottle insertion trajectory at high speed.
Payload sizing: Cybernetik’s 200 kg payload on the Six-Axis bottle case packer means the robot can pick a full bottle matrix , multiple bottles simultaneously , rather than picking individual bottles. This is what delivers 120 bottles per minute throughput rather than the 15 to 20 that single-bottle picking achieves. Always confirm that the payload specification includes the gripper weight plus the full matrix weight at your bottle size and fill volume.
Decision 2: Automatic Tool Changer for Multi-SKU Bottle Lines
Most bottle packaging operations run more than one bottle size, and many run more than one bottle format , 250 ml and 1 litre of the same product, or still and carbonated beverages in different diameters. An automatic tool changer is what allows the case packer robot to switch between bottle gripper configurations without stopping the line and without manual mechanical retooling.
Cybernetik’s Case Packer for Bottles includes an automatic tool changer for the pick-and-place robot that enables rapid switching between bottle variants. The tool change is recipe-driven , the operator selects the target SKU on the SCADA HMI, the robot automatically docks the current gripper and picks up the variant-matched gripper from the tool rack, and packing resumes. Total format changeover time drops from hours (mechanical) to minutes (recipe-driven). For a bottle line running six to eight SKUs across a shift, this is the feature that decides whether the case packer is a constraint or a throughput enabler.
Decision 3: Vision Quality Control in the Bottle Case Packing Stage
Bottle case packing quality control happens at two points: before loading (defective bottle rejection) and after loading (missing bottle detection). Cybernetik’s Case Packer for Bottles includes a vision system that checks for defective bottles and cartons after the matrix is assembled and before the case is sealed.
What the vision system inspects:
- Defective bottles, broken, cracked, incorrectly capped, wrong label orientation, or fill level out of tolerance.
- Defective cartons, mis-formed by the erector, damaged in transit to the packing station, or incorrectly positioned.
- Missing bottles, where the matrix formation station did not fully populate the required count before the robot pick.
For the Combo Case Packer for Shrink Pack and Bottles, Cybernetik adds 3D Point Cloud technology specifically for missing bottle detection, scanning the three-dimensional profile of the bottle matrix to identify any absent units before the case is sealed. Cases with defective bottles, defective cartons, or missing units are rejected in-line before they enter the downstream taping, printing, and palletizing sequence.
Decision 4: Single-Format or Combo Case Packer for Mixed Bottle and Shrink Pack Lines
Beverage lines that run both individual bottle SKUs and shrink-wrapped multipacks face a secondary packaging decision that pure-bottle lines do not: whether to run separate case packing lines for each format, or to invest in a single Combo Case Packer that handles both.
Cybernetik’s Case Packer for Shrink Pack and Bottles is a multipurpose robotic packaging solution with an automatic tool changer that switches between shrink pack and bottle handling. Customizable matrix formations are available for both formats. Rapid changeover of the carton guide funnel maintains last-mile placement accuracy whether the robot is placing a bottle or a shrink pack into the case. For beverage operations running both formats , common in carbonated drink, energy drink, and juice segments , the Combo configuration eliminates the capital cost of a second case packing line.
 “The right bottle case packer doesn’t just solve today’s packaging challenges; it provides the flexibility, quality control, and scalability needed for future growth.”
“The right bottle case packer doesn’t just solve today’s packaging challenges; it provides the flexibility, quality control, and scalability needed for future growth.”
.
See it in action
Decision 5: Building the Complete Case Packaging System Around Your Bottle Case Packer
A case packer for bottle packaging does not operate as a standalone machine. It is one station in a case packaging system that starts with the case erector and ends with the palletizer. Every machine in that system needs to be specified to the same throughput ceiling, under the same control architecture, with the same safety interlock chain.
Cybernetik designs complete case packaging systems for bottle lines as single-engineering-team projects. The typical system layout:
All seven stations operate under a single PLC with safety interlocks across the full line , one recipe on the HMI covers the complete case packaging system from erector to palletizer. When a fault is detected at any station, all stations stop cleanly.